CORRIDRONE is a UAV traffic management and mobility system developed to optimise airspace reservations for an unmanned aerial vehicle’s safe and reliable mobility. The whole system comprises four sub-systems, i.e. an onboard module, a server, a ground control station, and a communication system. CORRIDRONE server keeps track of all the requests to the system and reserves a corridor for its clients. The Onboard module keeps a UAV inside the allocated corridor during mobility, and the ground control station helps the operator to monitor UAV mobility in the corridor.
KEY ALGORITHMS INVOLVED IN THE CREATION OF CORRIDORS
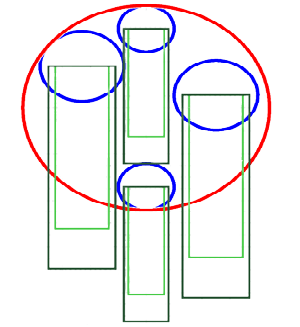
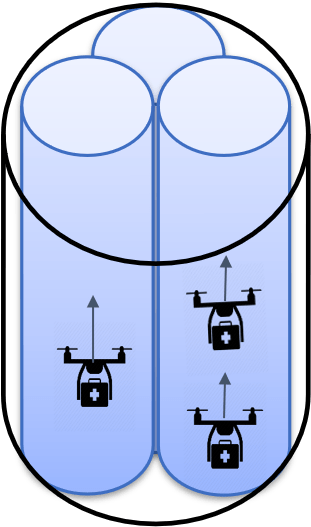
Cross-Section Design
Based on expected congestion, the required lanes are arranged in parallel. The design considers various aspects, such as the inter-vehicular downwash interaction for drones to use the lanes safely and with ease.
Corridor Planning
Given an airspace volume, start and destination, the algorithm provides optimal path corridors with smooth curvature lanes while considering the curvature limits of the UAVs flying within.
Lane Allocation
An algorithm is devised to assign UAVs to lanes designed for a corridor, given their size and desired formation, following the geofence constraints.
Conflict Resolution
For UAVs in a conflict in an intersection volume, the conflict resolution algorithm is executed that involves having a lane change or a change of speed. To ensure an optimal solution, only a minimal number of conflicted UAVs go through the change in trajectory.
Intersection Planning
Intersection planning or scheduling of UAVs involves pre-planning their respective trajectories for a batch formation. The algorithm considers having possibilities of entry-exit point management of a created intersection volume for virtual corridors.
Dynamic Obstacle Avoidance
In the presence of a rogue agent or any other dynamic obstacle in the vicinity, the multi-lane corridor geometry is dynamically modified using Cassini oval cross-sections, thus avoiding intersection with the agent’s path. It is preferred over temporal avoidance.